Lexus IS300h: Funkcja ostrzegania o pojeśdzie nadjeżdżającym z boku
Obszary, w których mogą być wykrywane pojazdy, wyszczególniono
poniżej.
Zasięg obszaru detekcji wynosi:
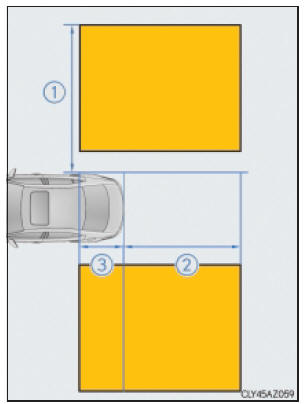
- Około 0,5 m do 3,5 m w bok
od samochodu*
*: Początkowe 0,5 m od boku samochodu
nie jest obszarem detekcji
- Około 3 m od tylnego zderzaka
w kierunku tyłu
- Około 1 m od tylnego zderzaka
w kierunku przodu

Ostrzeżenia dotyczące korzystania z układu
Za bezpieczeństwo odpowiada wyłącznie kierowca. Samochód należy
prowadzić
bezpiecznie, uważnie obserwując sytuację wokół niego.
Układ monitorowania martwych pól widoczności jest elementem pomocniczym,
który ostrzega o obecności innego pojazdu w martwym polu widoczności. Nie
należy nadmiernie polegać na jego działaniu. Układ nie rozstrzyga, czy można
bezpiecznie zmienić pas ruchu, dlatego nadmierne poleganie na jego działaniu
może doprowadzić do wypadku, w wyniku którego może dojść do śmierci lub
poważnych obrażeń ciała.
W pewnych warunkach układ może nie działać prawidłowo. Dlatego niezb
ędna jest bezpośrednia kontrola wzrokowa przez kierowcę, czy sytuacja
jest bezpieczna.
Układ monitorowania martwych pól widoczności działa, gdy
Funkcja monitorowania martwych pól widoczności działa, gdy spełnione są nast
ępujące warunki:
- Układ monitorowania martwych pól widoczności (BSM) jest włączony
- Dśwignia przekładni napędowej znajduje się w położeniu innym niż R.
- Samochód porusza się z prędkością powyżej około 16 km/h.
Funkcja monitorowania martwych pól widoczności wykryje pojazd, gdy
Funkcja monitorowania martwych pól widoczności wykryje pojazd w obszarze
detekcji w następujących sytuacjach:
- Samochód jest wyprzedzany przez pojazd poruszający się sąsiednim pasem
ruchu.
- W polu detekcji pojawi się pojazd zmieniający pas ruchu.
Warunki, w których funkcja monitorowania martwych pól widoczności nie
wykryje
pojazdu
Funkcja monitorowania martwych pól widoczności nie reaguje na następujące
rodzaje pojazdów i/lub obiektów:
- Małe motocykle, rowery, piesi itp.*
- Pojazdy jadące w przeciwnym kierunku
- Barierki, ściany, słupki drogowe, zaparkowane pojazdy i inne nieruchome
obiekty*
- Pojazdy jadące z tyłu tym samym pasem*
- Pojazdy jadące 2 pasy dalej od samochodu*
*: W pewnych warunkach może się zdarzyć, że układ zareaguje.
Warunki, w których funkcja monitorowania martwych pól widoczności może
działać nieprawidłowo
W następujących sytuacjach funkcja BSM może nie wykrywać prawidłowo
pojazdów:
- Gdy czujnik został przemieszczony z powodu silnego uderzenia czujnika
lub jego okolic
- Gdy czujnik lub jego okolice na tylnym zderzaku pokrywa błoto, śnieg,
lód, naklejki itp.
- Podczas jazdy po mokrej nawierzchni drogi spowodowanej intensywnymi
opadami deszczu, śniegu lub mgłą
- Gdy zbliża się kilka pojazdów, pomiędzy którymi jest tylko niewielki
odstęp
- Gdy odległość między samochodem a pojazdem jadącym za nim jest niewielka
- Gdy różnica prędkości pomiędzy samochodem a pojazdem wchodzącym
w obszar detekcji jest znacząca
- Gdy różnica w prędkości pomiędzy pojazdami zmienia się
- Gdy pojazd wjeżdżający w obszar detekcji porusza się z podobną
prędkością
- Gdy samochód zaczyna jazdę, pojazd pozostaje w obszarze detekcji
- Przy naprzemiennym wjeżdżaniu na wzniesienia jezdni i zjeżdżaniu
z nich, np. w górzystym terenie, na pofałdowanej drodze itp
- Podczas jazdy po drogach o ostrych łukach, seryjnych zakrętach lub
nierównomiernej
nawierzchni
- Gdy pasy ruchu są szerokie lub podczas jazdy na krawędzi pasa ruchu,
w związku z czym pojazd na sąsiednim pasie ruchu znajduje się zbyt daleko
- Podczas holowania przyczepy (wersje z przystosowaniem do holowania
przyczepy)
- Gdy z tyłu samochodu zamontowany jest uchwyt na rowery lub inne
akcesoria
- Gdy istnieje znacząca różnica wysokości samochodu i pojazdu, który
pojawił
się w polu detekcji
- Bezpośrednio po uruchomieniu układu monitorowania martwych pól
widoczności
(BSM)
Sytuacje dodatkowo zwiększające prawdopodobieństwo niewykrycia pojazdów
i/lub obiektów przez funkcję monitorowania martwych pól widoczności:
- Gdy czujnik został przemieszczony z powodu silnego uderzenia czujnika
lub jego okolic
- Gdy odległość między samochodem a barierką, ścianą itp. znajdującą się
w obszarze detekcji jest niewielka
- Przy naprzemiennym wjeżdżaniu na wzniesienia jezdni i zjeżdżaniu
z nich, np. w górzystym terenie, na pofałdowanej drodze itp.
- Gdy pasy ruchu są wąskie lub podczas jazdy na krawędzi pasa ruchu,
pojazd
na innym niż sąsiedni pas ruchu znajduje się w obszarze detekcji
- Podczas jazdy po drogach o ostrych łukach, seryjnych zakrętach lub
nierównomiernej
nawierzchni
- Gdy opony się ślizgają
- Gdy odległość między samochodem a pojazdem jadącym za nim jest niewielka
- Gdy z tyłu samochodu zamontowane są przedmioty takie jak uchwyt na
rowery lub inne akcesoria
- Podczas holowania przyczepy (wersje z przystosowaniem do holowania
przyczepy)
Zobacz tez:
Konsola środkowa u góry
Działanie
Audio 20/ COMAND Online (patrz oddzielna instrukcja obsługi)
Ogrzewanie foteli
Pojazdy Mercedes-AMG: AMG RIDE CONTROL (lewa strona)
Pojazdy Mercedes-AMG: ustawianie klapy spalin układu wydechowego AMG
Performance (prawa ...
Zasady ogólne
W samochodzie TDI clean diesel, do układu wydechowego wstrzykiwanyjest
roztwór mocznika (AdBlue) przed specjalnym katalizatorem,
aby zredukować emisje tlenków azotu.
AdBlue znajduje się w osobnym zbiorniku w samochod ...
Opis bocznych poduszek bezpieczeństwa
Rys. 189 Miejsce zamontowania poduszki bocznej w siedzeniu kierowcy
Boczne poduszki bezpieczeństwa umieszczone są w tapicerce opj przednich
siedzeń => rys. 189. Miejsca zamontowania oznaczone napisem "AIRBAG".
System bo ...

 Funkcja ostrzegania o pojeśdzie nadjeżdżającym z boku (RCTA)
Funkcja ostrzegania o pojeśdzie nadjeżdżającym z boku (RCTA) Monitorowanie martwych pól widoczności (BSM)
Monitorowanie martwych pól widoczności (BSM)